Full Text (PDF)
Indian Journal of Anesthesia and Analgesia 13(1):p 25-32, Jan-March 2026. | DOI: https://doi.org/10.21088/ijaa.2349.8471.13126.3
Review Article
Nano-Robotic Neurosurgery and Anesthetic Management Strate
Kunal Kumar Sharma, Bharti Chauhan
Author Information
Licence:
Attribution-Non-commercial 4.0 International (CC BY-NC 4.0)This license enables reusers to distribute, remix, adapt, and build upon the material in any medium or format for noncommercial purposes only, and only so long as attribution is given to the creator.
Indian Journal of Anesthesia and Analgesia 13(1):p 25-32, Jan-March 2026. | DOI: https://doi.org/10.21088/ijaa.2349.8471.13126.3
How Cite This Article:
Sharma KK, Chauhan B. Nano-robotic neurosurgery and anesthetic management strategies. Ind J Anesth Analg. 2026;13(1):25-32.Timeline
Received : October 16, 2025
Accepted : December 18, 2025
Published : March 30, 2026
Abstract
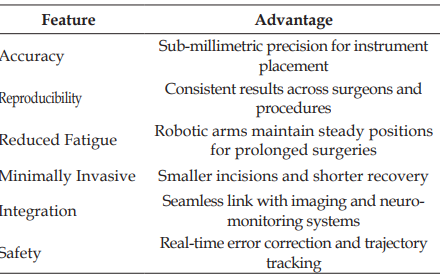
Background: Nano-robotic neurosurgical procedures represent a frontier in minimally invasive surgery, offering unprecedented precision in treating neurological disorders. These procedures introduce unique anesthetic challenges that require tailored approaches to ensure patient safety and procedural success.
Aim: This review explores key anesthetic considerations for nano-robotic neurosurgery, focusing on strategies to optimize patient outcomes
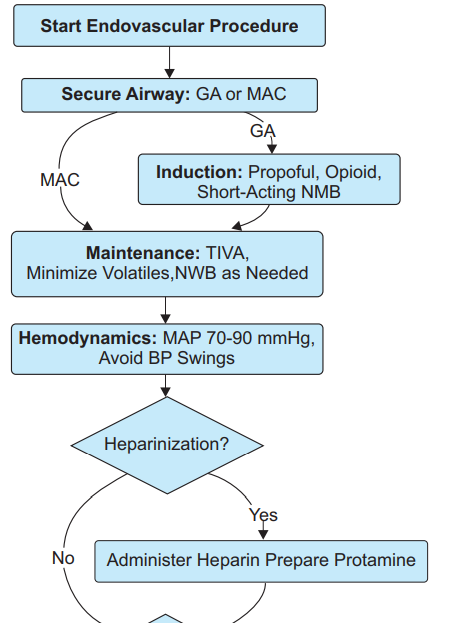
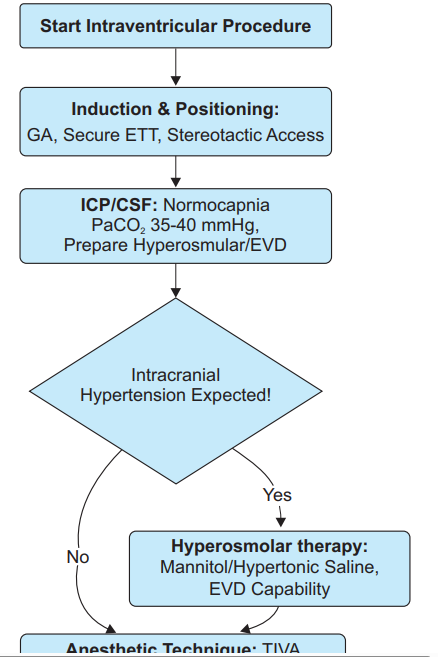
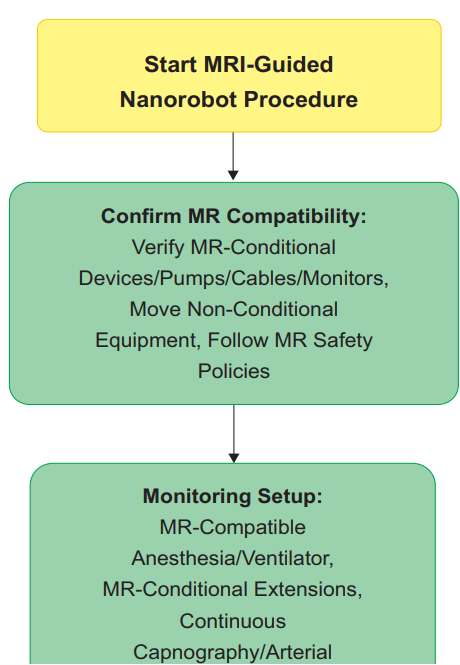
Issue: Anesthetic management prioritizes stable hemodynamics and intracranial pressure (ICP) to optimize the surgical field and protect neural structures. General anesthesia using total intravenous anesthesia (TIVA), using agents like propofol and remifentanil, is preferred for rapid titration and minimal impact on cerebral blood flow. Intraoperative neuromonitoring is employed for real-time neural function assessment, avoiding neuromuscular blockers that may interfere with signal accuracy. Protocols accommodate prolonged procedure times, patient immobility for nano-robot precision, and monitoring for potential thermal or mechanical neural irritation causing seizures or autonomic responses.
Conclusion: Nano-robotic neurosurgery demands specialized anesthetic protocols to address challenges such as stable hemodynamics, ICP control, and neuromonitoring compatibility. Effective collaboration between anesthesiologists, neurosurgeons, and nano-robotics engineers is critical to ensure patient safety and procedural success. Postoperative care emphasizes early neurological assessment and balanced pain management to support rapid recovery in this evolving field
References
- 1. Marcus HJ, Vakharia VN, Ourselin S, Duncan J, Tisdall M, Aquilina K. Robot-assisted stereotactic brain biopsy: systematic review and bibliometric analysis. Childs Nerv Syst. 2018;34(7):1299-309. doi: 10.1007/s00381-018-3821-y.
- 2. Kajita Y, Nakatsubo D, Kataoka H, Nagai T, Nakura T, Wakabayashi T. Installation of a Neuromate robot for stereotactic surgery: efforts to conform to Japanese specifications and an approach for clinical use—technical notes. Neurol Med Chir (Tokyo). 2015;55(12):907-14. doi: 10.2176/nmc.tn.2015-0043.
- 3. Liu L, Mariani SG, De Schlichting E, Grand S, Lefranc M, Seigneuret E, Chabardès S. Frameless ROSA® robot-assisted lead implantation for deep brain stimulation: technique and accuracy. Oper Neurosurg. 2020;19(1):57-64. doi: 10.1093/ons/opz320.
- 4. Giridharan N, Katlowitz KA, Anand A, Gadot R, Najera RA, Shofty B, et al. Robot-assisted deep brain stimulation: high accuracy and streamlined workflow. Oper Neurosurg. 2022;23(3):254-60. doi: 10.1227/ons.0000000000000298.
- 5. Palmisciano P, Miranda R, Ling GSF, Draghic N. Nanorobotics for neurosurgery. In: Kateb B, Heiss JD, Yu JS, Hsieh M, editors. The Textbook of Nanoneuroscience and Nanoneurosurgery. Cham: Springer; 2024. doi: 10.1007/978-3-030-80662-0_34.
- 6. Li J, Esteban-Fernández de Ávila B, Gao W, Zhang L, Wang J. Micro/nanorobots for biomedicine: delivery, surgery, sensing, and detoxification. Sci Robot. 2017;2(4):eaam6431. doi: 10.1126/scirobotics.aam6431.
- 7. Hii ARK, Qi X, Wu Z. Advanced strategies for CRISPR/Cas9 delivery and applications in gene editing, therapy, and cancer detection using nanoparticles and nanocarriers. J Mater Chem B. 2024;12(6):1467-89.
- 8. Kong X, Gao P, Wang J, Fang Y, Hwang KC. Advances of medical nanorobots for future cancer treatments. J Hematol Oncol. 2023;16(1):74. doi: 10.1186/s13045-023-01463-z.
- 9. Khan Z, Khan N, Geetha M, et al. Therapeutic applications of nanobots and nanocarriers in cancer treatment. Anal Sci. 2025;41(8):1305-24. doi: 10.1007/s44211-025-00799-5.
- 10. Sharma KK, Reddy KRM. Exploratory modeling of intraoperative co-oximetry data for predicting hemodynamic trends in a thalassemic patient: a pilot case. J Neuroanaesthesiol Crit Care. 2025;12(3). [Epub ahead of print]. doi: 10.1055/s-0045-1810607.
- 11. Kumar K, Gopalakrishna KN. Predictive modeling of intraoperative SSEP during ACOM aneurysm clipping - a case based simulation study. In: Abstracts From the 53rd Annual Meeting of the Society for Neuroscience in Anesthesiology and Critical Care; 2025 Sep 12-14. J Neurosurg Anesthesiol. 2026;38(1):e1-57.
- 12. Zhou H, Mayorga-Martinez CC, Pané S, Zhang L, Pumera M. Magnetically driven micro and nanorobots. Chem Rev. 2021;121(8):4999-5041. doi: 10.1021/acs.chemrev.0c01234.
- 13. Sharma KK, Sharma P, Surve RM. Cerebral oxygenation monitoring for early detection of subarachnoid haemorrhage in infratentorial arteriovenous malformation undergoing embolisation: a case study. Indian J Anaesth. 2024;68(2):206-8. doi: 10.4103/ija.ija_716_23.
- 14. Giergiel M. Certain problems in the development of nanorobots. Online J Robot Autom Technol. 2024;2(5):1-2. doi: 10.33552/OJRAT.2024.02.000547.
Data Sharing Statement
There are no additional data available. All raw data and code are available upon request.
Funding
This research received no funding.
Author Contributions
Whether all authors contributed significantly to the work and approve its publication.
Ethics Declaration
This article does not involve any human or animal subjects, and therefore does not require ethics approval.
Acknowledgements
This article does not involve any human or animal subjects, and therefore does not require ethics approval.
Conflicts of Interest
The authors report no conflicts of interest in this work.
About this article
Cite this article
Sharma KK, Chauhan B. Nano-robotic neurosurgery and anesthetic management strategies. Ind J Anesth Analg. 2026;13(1):25-32.
Licence:
Attribution-Non-commercial 4.0 International (CC BY-NC 4.0)This license enables reusers to distribute, remix, adapt, and build upon the material in any medium or format for noncommercial purposes only, and only so long as attribution is given to the creator.
| Received | Accepted | Published |
|---|---|---|
| October 16, 2025 | December 18, 2025 | March 30, 2026 |
DOI: https://doi.org/10.21088/ijaa.2349.8471.13126.3
Keywords
NanobotsNeurosurgeryRobotic SurgeryAnesthesiaSearch for Similar Articles
Similar Articles
- Awake Fibreoptic Intubation for Airway Management in Massive Thyroid Enlargement...
- A Case of Thoracotomy with One Lung Ventilation for Carcinoma Oesophagus
- A Case of Empyema for Thoracotomy and Decortication-Anaesthesia Management
- Full Mouth Rehabilitation in a 3-Year-Old Female Child with Repaired Tetralogy o...
- Do Gel Manicures Affect SpO2 Readings ? A Clinical Investigation
Article Level Metrics
Last UpdatedMonday 27 July 2026, 13:13:42 (IST)
6242
Accesses
41
720
00
Citations
NA
NA
NA
Download citation
Article Keywords
Keyword Highlighting
Highlight selected keywords in the article text.
Timeline
| Received | October 16, 2025 |
| Accepted | December 18, 2025 |
| Published | March 30, 2026 |
licence
Attribution-Non-commercial 4.0 International (CC BY-NC 4.0)
This license enables reusers to distribute, remix, adapt, and build upon the material in any medium or format for noncommercial purposes only, and only so long as attribution is given to the creator.